Fishfinder Transducers
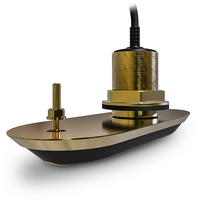
RealVision 3D Transducers for Axiom multifunction displays.
- Direct connect to Axiom MFDs
- Single transducer or Port Stbd pairs

Sonar transducers for a/e/c/eS series multifunction displays
- a,c,e,eS series direct connect
- NMEA2000 & STng smart transducers

Sonar transducers for digital sounder module fishfinders.
- DSM30 and DSM300 compatible
- CP300 and CP370 compatible


Chirp Sonar & DownVision & Transducers
- Compatible with CP100 and xx8 MFDs
- aSeries compatibility - a68, a78, a98 & a128
- eS Series compatibility - eS78, eS98 & eS128

Selecting a Transducer
When trying to determine which transducer is best for you, you'll need to consider the following variables:
MaterialThe first step is to determine what material the transducer should be composed of.
Bronze is preferable to plastic for wooden hulls because the expansion of wood could damage a plastic transducer and cause a leak. Installation of a bronze housing in a metal hull requires an insulating fairing, A metal housing should NOT be installed in a vessel with a positive ground system. Mounting OptionsHow the transducer should be mounted on the boat is also important.
Read Raymarines extended guide about transducer mounting options DisplayEnsure that the transducer you select has the features that you want to see displayed: depth, speed, temperature, or a combination. Transducer PowerPower refers to the strength with which the transducer sends the sonar "ping", expressed as watts RMS. Higher power increases your chances of getting a return echo in deep water or poor water conditions. It also lets you see better detail, such as bait fish and structure. Generally, the more power you have, the deeper you can reach and the easier it is to separate echoes returning from fish and bottom structure from all the other noises the transducer detects. |
||
Transducer FrequencyThe accuracy with which your fishfinder detects bottom and other objects is also determined by the frequency selected for the depth you are viewing. Raymarine depth transducers can be tuned to two different frequencies: 200 kHz (high) or 50kHz (low). 200 kHz (high) 200 kHz works best in water under 200 feet/60 meters and when you need to get an accurate reading while moving at faster speeds. High frequencies give you greater detail to detect very small objects but over a smaller portion of water. High frequencies typically show less noise and fewer undesired echoes while showing better target definition. 50 kHz (low) For deep water, 50 kHz is preferred. This is because water absorbs sound waves at a slower rate for low frequencies and the signal can travel farther before becoming too weak to use. The beam angle is wider at low frequencies, meaning the outgoing pulse is spread out more and is better suited for viewing a larger area under the boat. However, this also means less target definition and separation and increased susceptibility to noise. Although low frequencies can see deeper, they may not give you a clear picture of the bottom. Mud, soft sand, and plant life on the bottom absorb and scatter sound waves, resulting in a thicker bottom image. Rock, coral and hard sand reflect the signal easily and produce a thinner bottom display. This is easier to see using the 50 kHz setting, where the bottom returns are wider. A rule of thumb would be to use the 200 kHz setting for a detailed view to about 200 feet and then switch to 50 kHz when you want to look deeper. Better yet, display both views side-by-side on a split screen for both perspectives. |
200 kHz Echo Sounder Display in 50'(15m) of water. |
|
|
50 kHz Echo Sounder Display in 50' (15m) of water. |
||
Cone AnglesThe transducer concentrates the transmitted sound into a beam. In theory, the emitted pulse radiates out like a cone, widening as it travels deeper. In reality, beam shapes vary with the transducer type and typically exhibit "side lobe" patterns. The following figures give a graphic representation of the transducer's actual transmit radiation patterns.
Low frequencies have wider beam angles than high frequencies. For the scope of this discussion, however, the idea of a cone works just fine. The signal is strongest along the centerline of the cone and gradually diminishes as you move away from the center. Wider angles offer a larger view of the bottom, yet sacrifice resolution, since it spreads out the transmitter's power. The narrower cone concentrates the transmitter's power into a smaller viewable area. Cone angles are wider at low frequencies and narrower at high frequencies. To sum up, a wide cone angle can detect fish around the boat and not just those directly under it while exhibiting less target separation. A narrow cone concentrates the sound output enabling it to better detect small details, such as fish or bottom structure, but only scans a small amount of water at a time.
In reality, beam shapes vary with the transducer type and typically exhibit "side lobe" patterns. |
||








